SmartUQ is a modern AI software for engineering and physical sciences. Our Machine Learning, and Uncertainty Quantification tools are optimized for engineering applications including simulation, digital twins, testing, and manufacturing. With industry-leading model accuracy and user-friendly GUIs and APIs, it's possible to handle the toughest challenges and easily solve everyday problems.















.jpg "Kobelco Research Institute, Inc. logo")
SmartUQ's combination of unique sampling capabilities, powerful machine learning tools, and easy to use analytics help our customers solve previously unsolvable problems:
“SmartUQ has the best prediction accuracy among all tools I have ever used.”
“Our Uncertainty Quantification discipline now uses SmartUQ as its central tool and with it we have helped save millions of dollars and thousands of hours of work.”
“SmartUQ's adaptive design can significantly reduce the number of required simulations [a 72% reduction] and lead to much higher model accuracy [96% reduction in reference prediction error]”

SmartUQ offers Industry-Scale Uncertainty Quantification

SmartUQ: Predictive Analytics for Engineering and Physical Sciences
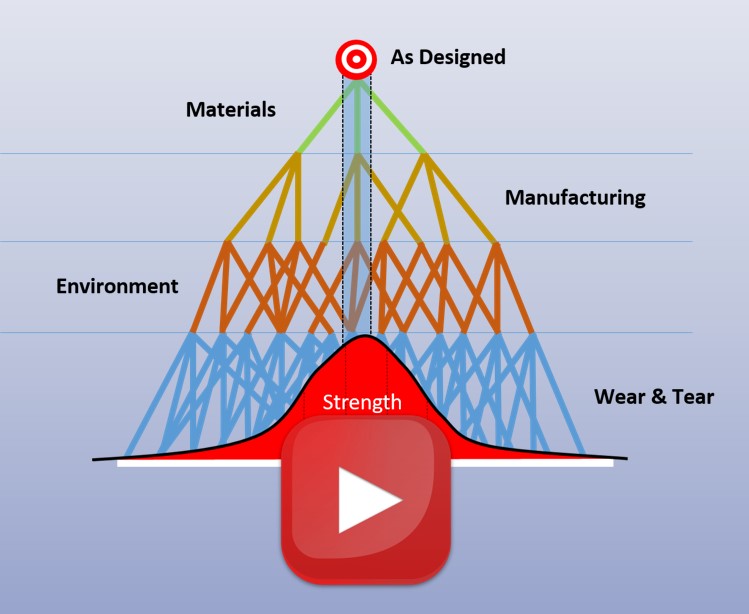
Manage your risk with SmartUQ
Gain the competitive edge with your analytics
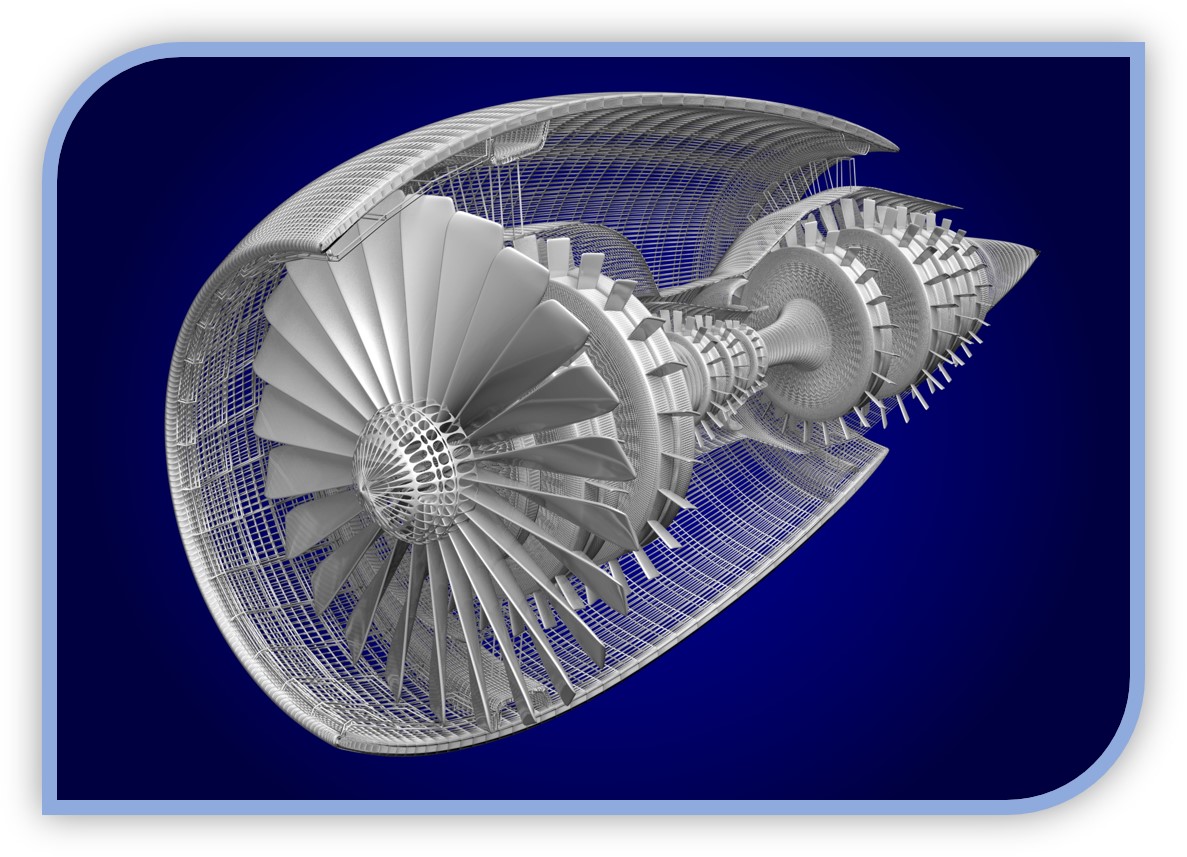
Turbine engines, like other complex systems, are composed of many subsystems featuring a wide variety of physics and extreme behavior. From a simulation and analysis perspective, this means there are many input dimensions and the system suffers from the curse of dimensionality: i.e., it requires an exponential increase in sampling to cover the design space for the same level of resolution.
With existing tools, the Jet Engine OEM couldn't scale up their engine performance exploration and characterization efforts without an exponential increase in simulation resources. Particularly challenging was high fidelity CFD simulation of transient thermal events.
SmartUQ developed faster and more efficient Design of Experiment and Emulation/ML modeling tools resulting in Best in Class Gaussian Process Modeling tools and several novel model types. These new tools made sampling and simulation requirements manageable while maintaining or improving model accuracy.

The OEM was using traditional approaches to calibrate individual components and full engine models with large numbers of calibration parameters. This process takes a large number of simulation runs and a large amount of engineering time. Despite the effort, this process can result in poor model fit and doesn’t produce model form error information.
SmartUQ ran a proof of concept demonstrating advance statistical and Bayesian calibration techniques for a cylinder combustion model. This also involved the construction of a predictive model and construction of discrepancy maps.
SmartUQ succeeded in generating accurate calibration parameters and discrepancy maps using a fraction of the simulation runs used with prior methods. This reduced the computation time substantially and allowed model form errors to be investigated. The success of this project lead to purchase and ongoing efforts towards full engine model calibration.



